aikido::planner::SingleProblemPlanner< Derived, ProblemT > Class Template Reference
SingleProblemPlanner is a base class for any concrete planner that are not a CompositePlanner. More...
#include <aikido/planner/SingleProblemPlanner.hpp>
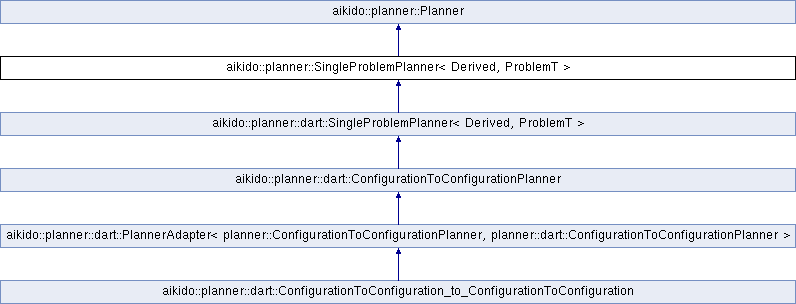
Inheritance diagram for aikido::planner::SingleProblemPlanner< Derived, ProblemT >:
Public Types | |
| using | SolvableProblem = ProblemT |
Public Member Functions | |
| SingleProblemPlanner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| Constructs from a state space. More... | |
| bool | canSolve (const Problem &problem) const final override |
Returns true if this planner can solve problem. More... | |
| trajectory::TrajectoryPtr | plan (const Problem &problem, Result *result=nullptr) final override |
Solves problem returning the result to result. More... | |
 Public Member Functions inherited from aikido::planner::Planner Public Member Functions inherited from aikido::planner::Planner | |
| Planner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| Constructs from a state space. More... | |
| virtual | ~Planner ()=default |
| Default destructor. More... | |
| statespace::ConstStateSpacePtr | getStateSpace () const |
| Returns const state space. More... | |
| common::RNG * | getRng () |
| Returns RNG. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from aikido::planner::Planner | |
| statespace::ConstStateSpacePtr | mStateSpace |
| State space associated with this planner. More... | |
| std::unique_ptr< common::RNG > | mRng |
| RNG the planner uses. More... | |
Detailed Description
template<typename Derived, typename ProblemT>
class aikido::planner::SingleProblemPlanner< Derived, ProblemT >
SingleProblemPlanner is a base class for any concrete planner that are not a CompositePlanner.
This is a curiously recurring template pattern implementation to avoid the same implementation of canSolve() and plan() across concrete planners. By inheriting this class the concrete planner doesn't need to implement those virtual functions.
- Template Parameters
-
Derived Concrete planner type. ProblemT Problem type the concrete planner is associated with.
Member Typedef Documentation
◆ SolvableProblem
template<typename Derived , typename ProblemT >
| using aikido::planner::SingleProblemPlanner< Derived, ProblemT >::SolvableProblem = ProblemT |
Constructor & Destructor Documentation
◆ SingleProblemPlanner()
template<typename Derived , typename ProblemT >
|
explicit |
Constructs from a state space.
- Parameters
-
[in] stateSpace State space that this planner associated with. [in] rng RNG that planner uses. If nullptr, a default is created.
Member Function Documentation
◆ canSolve()
template<typename Derived , typename ProblemT >
|
finaloverridevirtual |
Returns true if this planner can solve problem.
Implements aikido::planner::Planner.
◆ plan()
template<typename Derived , typename ProblemT >
|
finaloverridevirtual |
Solves problem returning the result to result.
- Parameters
-
[in] problem Planning problem to be solved by the planner. [out] result Result of planning procedure.
Implements aikido::planner::Planner.
