Planner that generates a trajectory that moves the end-effector by a given direction and distance. More...
#include <aikido/planner/vectorfield/VectorFieldConfigurationToEndEffectorOffsetPlanner.hpp>
Public Member Functions | |
| VectorFieldConfigurationToEndEffectorOffsetPlanner (statespace::dart::ConstMetaSkeletonStateSpacePtr stateSpace, ::dart::dynamics::MetaSkeletonPtr metaSkeleton, double distanceTolerance, double positionTolerance, double angularTolerance, double initialStepSize, double jointLimitTolerance, double constraintCheckResolution, std::chrono::duration< double > timelimit) | |
| Constructor. More... | |
| trajectory::TrajectoryPtr | plan (const SolvableProblem &problem, Result *result=nullptr) override |
| Plan to a trajectory that moves the end-effector by a given direction and distance. More... | |
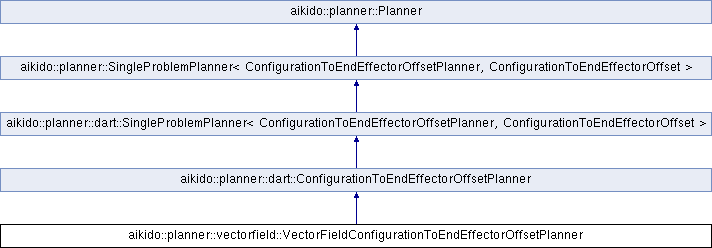
 Public Member Functions inherited from aikido::planner::dart::ConfigurationToEndEffectorOffsetPlanner Public Member Functions inherited from aikido::planner::dart::ConfigurationToEndEffectorOffsetPlanner | |
| ConfigurationToEndEffectorOffsetPlanner (statespace::dart::ConstMetaSkeletonStateSpacePtr stateSpace, ::dart::dynamics::MetaSkeletonPtr metaSkeleton) | |
| Constructor. More... | |
| virtual trajectory::TrajectoryPtr | plan (const SolvableProblem &problem, Result *result=nullptr)=0 |
Solves problem returning the result to result. More... | |
| Public Member Functions inherited from aikido::planner::dart::SingleProblemPlanner< ConfigurationToEndEffectorOffsetPlanner, ConfigurationToEndEffectorOffset > | |
| SingleProblemPlanner (statespace::dart::ConstMetaSkeletonStateSpacePtr stateSpace, ::dart::dynamics::MetaSkeletonPtr metaSkeleton) | |
| Constructor. More... | |
| statespace::dart::ConstMetaSkeletonStateSpacePtr | getMetaSkeletonStateSpace () const |
| Return this planner's MetaSkeletonStateSpace. More... | |
| ::dart::dynamics::MetaSkeletonPtr | getMetaSkeleton () |
| Return this planner's MetaSkeleton. More... | |
| Public Member Functions inherited from aikido::planner::SingleProblemPlanner< ConfigurationToEndEffectorOffsetPlanner, ConfigurationToEndEffectorOffset > | |
| SingleProblemPlanner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| bool | canSolve (const Problem &problem) const final override |
Returns true if this planner can solve problem. More... | |
| trajectory::TrajectoryPtr | plan (const Problem &problem, Result *result=nullptr) final override |
Solves problem returning the result to result. More... | |
| Public Member Functions inherited from aikido::planner::Planner | |
| Planner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| Constructs from a state space. More... | |
| virtual | ~Planner ()=default |
| Default destructor. More... | |
| statespace::ConstStateSpacePtr | getStateSpace () const |
| Returns const state space. More... | |
| common::RNG * | getRng () |
| Returns RNG. More... | |
Protected Attributes | |
| double | mDistanceTolerance |
| How much a planned trajectory is allowed to deviate from the requested distance to move the end-effector. More... | |
| double | mPositionTolerance |
| How a planned trajectory is allowed to deviated from a straight line segment defined by the direction and the distance. More... | |
| double | mAngularTolerance |
| How a planned trajectory is allowed to deviate from a given direction. More... | |
| double | mInitialStepSize |
| Initial step size. More... | |
| double | mJointLimitTolerance |
| If less then this distance to joint limit, velocity is bounded in that direction to 0. More... | |
| double | mConstraintCheckResolution |
| Resolution used in constraint checking. More... | |
| std::chrono::duration< double > | mTimelimit |
| Timeout in seconds. More... | |
| Protected Attributes inherited from aikido::planner::dart::SingleProblemPlanner< ConfigurationToEndEffectorOffsetPlanner, ConfigurationToEndEffectorOffset > | |
| statespace::dart::ConstMetaSkeletonStateSpacePtr | mMetaSkeletonStateSpace |
| Stores stateSpace pointer as a ConstMetaSkeletonStateSpacePtr. More... | |
| ::dart::dynamics::MetaSkeletonPtr | mMetaSkeleton |
| MetaSkeleton to use for planning. More... | |
| Protected Attributes inherited from aikido::planner::Planner | |
| statespace::ConstStateSpacePtr | mStateSpace |
| State space associated with this planner. More... | |
| std::unique_ptr< common::RNG > | mRng |
| RNG the planner uses. More... | |
Additional Inherited Members | |
| Public Types inherited from aikido::planner::SingleProblemPlanner< ConfigurationToEndEffectorOffsetPlanner, ConfigurationToEndEffectorOffset > | |
| using | SolvableProblem = ConfigurationToEndEffectorOffset |
Detailed Description
Planner that generates a trajectory that moves the end-effector by a given direction and distance.
Constructor & Destructor Documentation
◆ VectorFieldConfigurationToEndEffectorOffsetPlanner()
| aikido::planner::vectorfield::VectorFieldConfigurationToEndEffectorOffsetPlanner::VectorFieldConfigurationToEndEffectorOffsetPlanner | ( | statespace::dart::ConstMetaSkeletonStateSpacePtr | stateSpace, |
| ::dart::dynamics::MetaSkeletonPtr | metaSkeleton, | ||
| double | distanceTolerance, | ||
| double | positionTolerance, | ||
| double | angularTolerance, | ||
| double | initialStepSize, | ||
| double | jointLimitTolerance, | ||
| double | constraintCheckResolution, | ||
| std::chrono::duration< double > | timelimit | ||
| ) |
Constructor.
- Parameters
-
[in] stateSpace State space that this planner is associated with. [in] metaSkeleton MetaSkeleton to plan with. [in] distanceTolerance How much a planned trajectory is allowed to deviate from the requested distance to move the end-effector. [in] positionTolerance How a planned trajectory is allowed to deviated from a straight line segment defined by the direction and the distance. [in] angularTolerance How a planned trajectory is allowed to deviate from a given direction. [in] initialStepSize Initial step size. [in] jointLimitTolerance If less then this distance to joint limit, velocity is bounded in that direction to 0. [in] constraintCheckResolution Resolution used in constraint checking. [in] timelimit timeout in seconds.
Member Function Documentation
◆ plan()
|
override |
Plan to a trajectory that moves the end-effector by a given direction and distance.
The planner returns success if the resulting trajectory satisfies constraint at some resolution and failure (returning nullptr) otherwise. The reason for the failure is stored in the result output parameter.
- Parameters
-
[in] problem Planning problem. [out] result Information about success or failure.
- Returns
- Trajectory or
nullptrif planning failed.
Member Data Documentation
◆ mAngularTolerance
|
protected |
How a planned trajectory is allowed to deviate from a given direction.
◆ mConstraintCheckResolution
|
protected |
Resolution used in constraint checking.
◆ mDistanceTolerance
|
protected |
How much a planned trajectory is allowed to deviate from the requested distance to move the end-effector.
◆ mInitialStepSize
|
protected |
Initial step size.
◆ mJointLimitTolerance
|
protected |
If less then this distance to joint limit, velocity is bounded in that direction to 0.
◆ mPositionTolerance
|
protected |
How a planned trajectory is allowed to deviated from a straight line segment defined by the direction and the distance.
◆ mTimelimit
|
protected |
Timeout in seconds.
