Planner that plans the straight-line trajectory to the goal. More...
#include <aikido/planner/SnapConfigurationToConfigurationPlanner.hpp>
Public Member Functions | |
| SnapConfigurationToConfigurationPlanner (statespace::ConstStateSpacePtr stateSpace, statespace::ConstInterpolatorPtr interpolator=nullptr) | |
| Constructor. More... | |
| trajectory::TrajectoryPtr | plan (const SolvableProblem &problem, Result *result=nullptr) override |
| Plans a trajectory from start state to goal state by using an interpolator to interpolate between them. More... | |
| void | setInterpolator (statespace::ConstInterpolatorPtr interpolator) |
| Sets interpolator used to produce the output trajectory. More... | |
| statespace::ConstInterpolatorPtr | getInterpolator () const |
| Returns the interpolator used to produce the output trajectory. More... | |
 Public Member Functions inherited from aikido::planner::ConfigurationToConfigurationPlanner Public Member Functions inherited from aikido::planner::ConfigurationToConfigurationPlanner | |
| ConfigurationToConfigurationPlanner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| Constructs from a state space. More... | |
| trajectory::TrajectoryPtr | plan (const Problem &problem, Result *result=nullptr) final override |
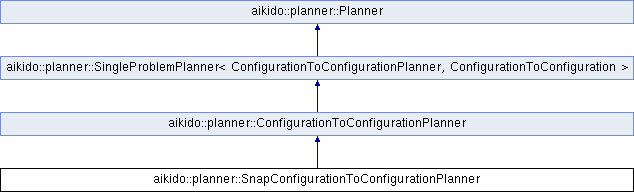
| Public Member Functions inherited from aikido::planner::SingleProblemPlanner< ConfigurationToConfigurationPlanner, ConfigurationToConfiguration > | |
| SingleProblemPlanner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| bool | canSolve (const Problem &problem) const final override |
Returns true if this planner can solve problem. More... | |
| trajectory::TrajectoryPtr | plan (const Problem &problem, Result *result=nullptr) final override |
Solves problem returning the result to result. More... | |
| Public Member Functions inherited from aikido::planner::Planner | |
| Planner (statespace::ConstStateSpacePtr stateSpace, common::RNG *rng=nullptr) | |
| Constructs from a state space. More... | |
| virtual | ~Planner ()=default |
| Default destructor. More... | |
| statespace::ConstStateSpacePtr | getStateSpace () const |
| Returns const state space. More... | |
| common::RNG * | getRng () |
| Returns RNG. More... | |
Protected Attributes | |
| statespace::ConstInterpolatorPtr | mInterpolator |
| Interpolator used to produce the output trajectory. More... | |
| Protected Attributes inherited from aikido::planner::Planner | |
| statespace::ConstStateSpacePtr | mStateSpace |
| State space associated with this planner. More... | |
| std::unique_ptr< common::RNG > | mRng |
| RNG the planner uses. More... | |
Additional Inherited Members | |
| Public Types inherited from aikido::planner::SingleProblemPlanner< ConfigurationToConfigurationPlanner, ConfigurationToConfiguration > | |
| using | SolvableProblem = ConfigurationToConfiguration |
Detailed Description
Planner that plans the straight-line trajectory to the goal.
SnapPlanner is a utility planner class that collision checks the straight-line trajectory to the goal. If that trajectory is invalid, e.g., due to an environment or self collision, the planner immediately returns nullptr.
SnapPlanner is intended to be used only as a "short circuit" to speed-up planning between nearby configurations. This planner is most commonly used as the first item in a Sequence meta-planner to avoid calling a motion planner when the trivial solution is valid.
Constructor & Destructor Documentation
◆ SnapConfigurationToConfigurationPlanner()
|
explicit |
Constructor.
- Parameters
-
[in] stateSpace State space that this planner associated with. [in] interpolator Interpolator used to produce the output trajectory. If nullptr is passed in, GeodesicInterpolator is used by default.
Member Function Documentation
◆ getInterpolator()
| statespace::ConstInterpolatorPtr aikido::planner::SnapConfigurationToConfigurationPlanner::getInterpolator | ( | ) | const |
Returns the interpolator used to produce the output trajectory.
◆ plan()
|
overridevirtual |
Plans a trajectory from start state to goal state by using an interpolator to interpolate between them.
The planner returns success if the resulting trajectory satisfies constraint at some resolution and failure (returning nullptr) otherwise. The reason for the failure is stored in the result output parameter.
- Parameters
-
[in] problem Planning problem. [out] result Information about success or failure.
- Returns
- Trajectory or
nullptrif planning failed.
- Exceptions
-
If problemis not ConfigurationToConfiguration.If resultis not ConfigurationToConfiguration::Result.
Implements aikido::planner::ConfigurationToConfigurationPlanner.
◆ setInterpolator()
| void aikido::planner::SnapConfigurationToConfigurationPlanner::setInterpolator | ( | statespace::ConstInterpolatorPtr | interpolator | ) |
Sets interpolator used to produce the output trajectory.
Member Data Documentation
◆ mInterpolator
|
protected |
Interpolator used to produce the output trajectory.
