StateSpace of a DART MetaSkeleton.
More...
#include <aikido/statespace/dart/MetaSkeletonStateSpace.hpp>
Classes | |
| class | Properties |
Static properties from the DART MetaSkeleton. More... | |
Public Types | |
| using | ScopedState = statespace::ScopedState< StateHandle > |
 Public Types inherited from aikido::statespace::CartesianProduct Public Types inherited from aikido::statespace::CartesianProduct | |
| using | StateHandle = CompoundStateHandle< State > |
| using | StateHandleConst = CompoundStateHandle< const State > |
| using | ScopedState = statespace::ScopedState< StateHandle > |
| using | ScopedStateConst = statespace::ScopedState< StateHandleConst > |
| Public Types inherited from aikido::statespace::StateSpace | |
| using | StateHandle = statespace::StateHandle< StateSpace, State > |
| using | StateHandleConst = statespace::StateHandle< StateSpace, const State > |
| using | ScopedState = statespace::ScopedState< StateHandle > |
| using | ScopedStateConst = statespace::ScopedState< StateHandleConst > |
Public Member Functions | |
| MetaSkeletonStateSpace (const ::dart::dynamics::MetaSkeleton *metaskeleton) | |
Constructs a state space for a DART MetaSkeleton. More... | |
| const Properties & | getProperties () const |
| Gets the MetaSkeleton properties associated with this state space. More... | |
| bool | isCompatible (const ::dart::dynamics::MetaSkeleton *metaskeleton) const |
| Returns whether the MetaSkeleton can be used with this state space. More... | |
| void | checkCompatibility (const ::dart::dynamics::MetaSkeleton *metaskeleton) const |
| Throws an error if the MetaSkeleton cannot be used with this state space. More... | |
| void | checkIfContained (const ::dart::dynamics::Skeleton *skeleton) const |
Checks whether this skeleton contains all dofs defined in this state space. More... | |
| template<class Space = JointStateSpace> | |
| std::shared_ptr< Space > | getJointSpace (const ::dart::dynamics::MetaSkeleton *_metaskeleton, const ::dart::dynamics::Joint *_joint) const |
Gets the subspace corresponding to _joint in _metaskeleton. More... | |
| template<class Space = JointStateSpace> | |
| std::shared_ptr< const Space > | getJointSpace (std::size_t _index) const |
Gets the subspace corresponding to joint with index _index. More... | |
| void | convertPositionsToState (const Eigen::VectorXd &_positions, State *_state) const |
Converts DART MetaSkeleton positions, e.g. More... | |
| void | convertStateToPositions (const State *_state, Eigen::VectorXd &_positions) const |
Converts a State in this state space to DART MetaSkeleton positions, e.g. More... | |
| void | getState (const ::dart::dynamics::MetaSkeleton *_metaskeleton, State *_state) const |
Gets the positions of the _metaskeleton and store them in _state. More... | |
| void | setState (::dart::dynamics::MetaSkeleton *_metaskeleton, const State *_state) const |
Sets the positions of the _metaskeleton to _state. More... | |
| ScopedState | getScopedStateFromMetaSkeleton (const ::dart::dynamics::MetaSkeleton *_metaskeleton) const |
Wrapper for getStateFromMetaSkeleton that returns a ScopedState. More... | |
| ::dart::dynamics::MetaSkeletonPtr | getControlledMetaSkeleton (const ::dart::dynamics::SkeletonPtr &_skeleton) const |
| Returns MetaSkeleton this space operates on. More... | |
| Public Member Functions inherited from aikido::statespace::CartesianProduct | |
| CartesianProduct (std::vector< ConstStateSpacePtr > _subspaces) | |
| Construct the Cartesian product of a vector of subspaces. More... | |
| ScopedState | createState () const |
Helper function to create a ScopedState. More... | |
| ScopedState | cloneState (const StateSpace::State *stateIn) const |
Creates an identical clone of stateIn. More... | |
| std::size_t | getNumSubspaces () const |
| Gets number of subspaces. More... | |
| template<class Space = StateSpace> | |
| std::shared_ptr< const Space > | getSubspace (std::size_t _index) const |
Gets subspace of type Space by at _index. More... | |
| template<class Space = StateSpace> | |
| Space::State * | getSubState (State *_state, std::size_t _index) const |
Gets substate of type Space::State from a CompoundState by index. More... | |
| template<class Space = StateSpace> | |
| const Space::State * | getSubState (const State *_state, std::size_t _index) const |
Gets substate of type Space::State from a CompoundState by index. More... | |
| template<class Space = StateSpace> | |
| Space::StateHandle | getSubStateHandle (State *_state, std::size_t _index) const |
Gets substate of type Space::State from a CompoundState by index and wraps it in a Space::StateHandle helper class. More... | |
| template<class Space = StateSpace> | |
| Space::StateHandleConst | getSubStateHandle (const State *_state, std::size_t _index) const |
Gets substate of type Space::State from a CompoundState by index and wraps it in a Space::ConstStateHandle helper class. More... | |
| std::size_t | getStateSizeInBytes () const override |
| Gets the size of a State, in bytes. More... | |
| StateSpace::State * | allocateStateInBuffer (void *_buffer) const override |
| Create a new state in a pre-allocated buffer. More... | |
| void | freeStateInBuffer (StateSpace::State *_state) const override |
Free a state previously created by allocateStateInBuffer. More... | |
| void | compose (const StateSpace::State *_state1, const StateSpace::State *_state2, StateSpace::State *_out) const override |
| Lie group operation for this StateSpace. More... | |
| void | getIdentity (StateSpace::State *_state) const override |
| Gets the identity element for this Lie group, such that: More... | |
| void | getInverse (const StateSpace::State *_in, StateSpace::State *_out) const override |
Gets the inverse of _in in this Lie group, such that: More... | |
| std::size_t | getDimension () const override |
| Get the dimension of this Lie group. More... | |
| void | copyState (const StateSpace::State *_source, StateSpace::State *_destination) const override |
| Copy a state. More... | |
| void | expMap (const Eigen::VectorXd &_tangent, StateSpace::State *_out) const override |
| Exponential mapping of Lie algebra element to a Lie group element. More... | |
| void | logMap (const StateSpace::State *_in, Eigen::VectorXd &_tangent) const override |
| Log mapping of Lie group element to a Lie algebra element. More... | |
| void | print (const StateSpace::State *_state, std::ostream &_os) const override |
| Print the contents of each substate contained in the state as a list with each substate enclosed in brackets and including its index Format: [0: ...] [1: ...] ... More... | |
| virtual void | compose (const State *_state1, const State *_state2, State *_out) const=0 |
| Lie group operation for this StateSpace. More... | |
| virtual void | compose (State *_state1, const State *_state2) const |
| Lie group operation for this StateSpace. More... | |
| Public Member Functions inherited from aikido::statespace::StateSpace | |
| virtual | ~StateSpace ()=default |
| ScopedState | createState () const |
Helper function to create a ScopedState. More... | |
| ScopedState | cloneState (const State *stateIn) const |
Creates an identical clone of stateIn. More... | |
| virtual State * | allocateState () const |
| Allocate a new state. More... | |
| virtual void | freeState (State *_state) const |
Free a state previously created by allocateState. More... | |
| virtual void | compose (State *_state1, const State *_state2) const |
| Lie group operation for this StateSpace. More... | |
| virtual void | getInverse (State *_state) const |
Gets the inverse of _in in this Lie group. More... | |
Private Attributes | |
| Properties | mProperties |
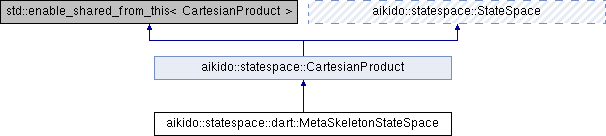
Detailed Description
StateSpace of a DART MetaSkeleton.
This is a CartesianProduct, where the i-th subspace is a JointStateSpace for the i-th Joint of the MetaSkeleton. This class provides functions for converting between State objects and vectors of DART joint positions.
The behavior of this class is undefined if you modify the structure of the MetaSkeleton or its position limits after construction.
Member Typedef Documentation
◆ ScopedState
Constructor & Destructor Documentation
◆ MetaSkeletonStateSpace()
|
explicit |
Constructs a state space for a DART MetaSkeleton.
- Parameters
-
metaskeleton target MetaSkeleton
Member Function Documentation
◆ checkCompatibility()
| void aikido::statespace::dart::MetaSkeletonStateSpace::checkCompatibility | ( | const ::dart::dynamics::MetaSkeleton * | metaskeleton | ) | const |
Throws an error if the MetaSkeleton cannot be used with this state space.
- Parameters
-
metaskeleton MetaSkeleton to check
- Exceptions
-
invalid_argument if the MetaSkeleton does not match the state space
◆ checkIfContained()
| void aikido::statespace::dart::MetaSkeletonStateSpace::checkIfContained | ( | const ::dart::dynamics::Skeleton * | skeleton | ) | const |
Checks whether this skeleton contains all dofs defined in this state space.
- Exceptions
-
invalid_argument if skeletondoes not contain all dofs if this state space.
◆ convertPositionsToState()
| void aikido::statespace::dart::MetaSkeletonStateSpace::convertPositionsToState | ( | const Eigen::VectorXd & | _positions, |
| State * | _state | ||
| ) | const |
Converts DART MetaSkeleton positions, e.g.
those returned by getPositions, to a State in this state space.
- Parameters
-
_positions input DART MetaSkeletonpositions[out] _state output state
◆ convertStateToPositions()
| void aikido::statespace::dart::MetaSkeletonStateSpace::convertStateToPositions | ( | const State * | _state, |
| Eigen::VectorXd & | _positions | ||
| ) | const |
Converts a State in this state space to DART MetaSkeleton positions, e.g.
that may be passed to setPositions.
- Parameters
-
_state input state [out] _positions output DART MetaSkeletonpositions
◆ getControlledMetaSkeleton()
| ::dart::dynamics::MetaSkeletonPtr aikido::statespace::dart::MetaSkeletonStateSpace::getControlledMetaSkeleton | ( | const ::dart::dynamics::SkeletonPtr & | _skeleton | ) | const |
Returns MetaSkeleton this space operates on.
- Parameters
-
_skeleton Skeletonto create MetaSkeleton from.
◆ getJointSpace() [1/2]
| std::shared_ptr< Space > aikido::statespace::dart::MetaSkeletonStateSpace::getJointSpace | ( | const ::dart::dynamics::MetaSkeleton * | _metaskeleton, |
| const ::dart::dynamics::Joint * | _joint | ||
| ) | const |
Gets the subspace corresponding to _joint in _metaskeleton.
- Template Parameters
-
Space type of StateSpaceto return
- Parameters
-
_metaskeleton MetaSkeleton containing _joint_joint joint in _metaskeleton
- Returns
- state space corresponding to
_joint
◆ getJointSpace() [2/2]
| std::shared_ptr< const Space > aikido::statespace::dart::MetaSkeletonStateSpace::getJointSpace | ( | std::size_t | _index | ) | const |
Gets the subspace corresponding to joint with index _index.
- Template Parameters
-
Space type of StateSpaceto return
- Parameters
-
_index index of a joint in the MetaSkeleton
- Returns
- state space corresponding to
_joint
◆ getProperties()
| const Properties& aikido::statespace::dart::MetaSkeletonStateSpace::getProperties | ( | ) | const |
Gets the MetaSkeleton properties associated with this state space.
- Returns
- MetaSkeleton properties associated with this state space
◆ getScopedStateFromMetaSkeleton()
| ScopedState aikido::statespace::dart::MetaSkeletonStateSpace::getScopedStateFromMetaSkeleton | ( | const ::dart::dynamics::MetaSkeleton * | _metaskeleton | ) | const |
Wrapper for getStateFromMetaSkeleton that returns a ScopedState.
- Parameters
-
_metaskeleton MetaSkeletonto get state from
- Returns
- current state of the
_metaskeleton
◆ getState()
| void aikido::statespace::dart::MetaSkeletonStateSpace::getState | ( | const ::dart::dynamics::MetaSkeleton * | _metaskeleton, |
| State * | _state | ||
| ) | const |
Gets the positions of the _metaskeleton and store them in _state.
- Parameters
-
_metaskeleton MetaSkeletonto get position from[out] _state output state
◆ isCompatible()
| bool aikido::statespace::dart::MetaSkeletonStateSpace::isCompatible | ( | const ::dart::dynamics::MetaSkeleton * | metaskeleton | ) | const |
Returns whether the MetaSkeleton can be used with this state space.
- Parameters
-
metaskeleton MetaSkeleton to check
- Returns
- true if MetaSkeleton is compatible
◆ setState()
| void aikido::statespace::dart::MetaSkeletonStateSpace::setState | ( | ::dart::dynamics::MetaSkeleton * | _metaskeleton, |
| const State * | _state | ||
| ) | const |
Sets the positions of the _metaskeleton to _state.
- Parameters
-
_metaskeleton MetaSkeletonto set position for_state input state
Member Data Documentation
◆ mProperties
|
private |
